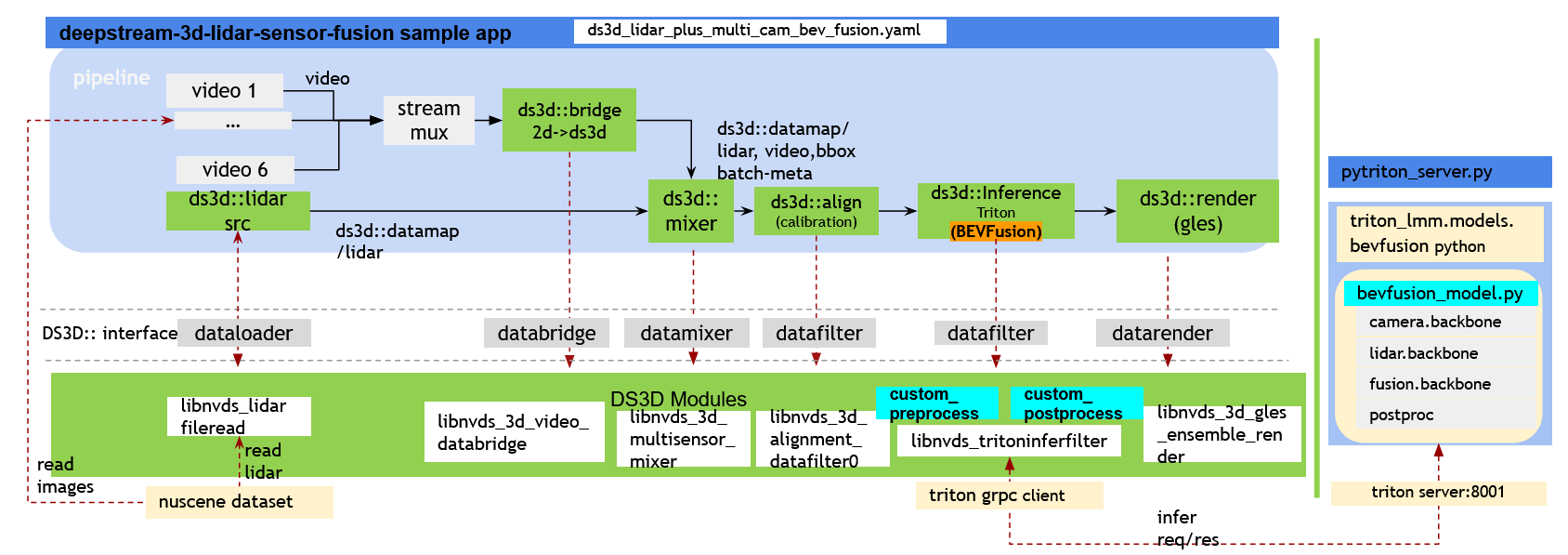
DeepStream-3D Multi-Modal BEVFusion Setup#
The pipeline efficiently processes data from 6 cameras and 1 LiDAR, leveraging a pre-trained PyTorch BEVFusion model. This model is optimized for NVIDIA GPUs using TensorRT and CUDA, as showcased by the CUDA-BEVFusion project. Enhancing integration, a multi-modal inference module (triton-lmm) based on PyTriton simplifies the incorporation of the Python BEVFusion model. The pipeline seamlessly employs ds3d::datatfiler for triton inference through gRPC. Ultimately, users can visualize the results by examining the ds3d::datamap with 6 camera views. The pipeline also projects LiDAR data and 3D bounding boxes into each view. Furthermore, the same LiDAR data is thoughtfully visualized in both a top view and a side view for enhanced comprehension.
To run the demo, you need to run two processes, either on the same machine or on different machines.
Run tritonserver to startup pytriton-hosted BEVFusion model. This model requires an x86 platform with a GPU compute capability of 8.0 or higher.
Run the DS3D sensor fusion 3D detection pipeline to request inference from the Triton server. The pipeline can run on any x86 or Jetson platform.
Prerequisites#
The following development packages must be installed.
GStreamer-1.0
GStreamer-1.0 Base Plugins
GLES library
libyaml-cpp-dev
Download and install DeepStream SDK locally.
Dependencies for Triton Server are automatically installed during the building of the DeepStream Triton BEVFusion container. Check dependencies in
/opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion/bevfusion/bevfusion.Dockerfile
Note
If scripts are run outside of container or if file read/write permission errors are experienced, please run the commands with sudo -E.
Getting Started#
To get started, navigate to the following directory:
# run the following commandline outside of the container.
$ export DISPLAY=0.0 # set the correct display number if DISPLAY is not exported
$ xhost +
$ cd /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion
$ sudo chmod -R a+rw . # Grant read/write permission for all of the files in this folder
Note
All the following commandline for BEVFusion setup are run outside of the container unless other comments specified
Prepare DeepStream Triton BEVFusion Container and Models on X86 with a dGPU#
Build the Docker Target Image for deepstream-triton-bevfusion [x86]#
Build the docker target image named deepstream-triton-bevfusion:{DS_VERSION_NUM}.
Ensure that the DeepStream version number, represented by {DS_VERSION_NUM}, is greater than or equal to 7.0.
Run the following script to build the target image on top of the DeepStream Triton base image:
# The following commands are require to enable Docker-in-Docker functionality if anyone want to run
# DeepStream docker inside another docker.
# Please start the container using a command like the following, adding your own parameters as needed:
# docker run --gpus all -it --rm --net=host --privileged \
# -v /usr/bin/docker:/usr/bin/docker \
# -v /usr/libexec/docker:/usr/libexec/docker \
# -v /var/run/docker.sock:/var/run/docker.sock \
# -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=$DISPLAY nvcr.io/nvidia/deepstream:{xx.xx.xx}-triton-multiarch
$ bevfusion/docker_build_bevfusion_image.sh nvcr.io/nvidia/deepstream:{xx.xx.xx}-triton-multiarch
Note
Replace {xx.xx.xx} with a version number greater than or equal to 7.0. The latest base image can be found at: https://catalog.ngc.nvidia.com/orgs/nvidia/containers/deepstream
For Blackwell serials platform, the NVCC build flags in the bevfusion/bevfusion.Dockerfile should be modified for the new GPU types. E.G. For GeForce RTX 5090, set -gencode arch=compute_120,code=compute_120 with the ARG CUDA_NVCC_FLAGS part.
Similarly, pytorch also needs to be upgraded to the new version, modify bevfusion/bevfusion.Dockerfile like pip3 install torch==2.7.1 --index-url https://download.pytorch.org/whl/cu128 --break-system-packages
Download CUDA-BEVFusion Models and Build TensorRT Engine Files [x86]#
Download the model chunks from CUDA-BEVFusion and use trtexec to convert some ONNX model chunks into TensorRT engine files with INT8 precision. The user needs to specify a host directory to store the models. The script will mount this directory to the target container to prepare the model files.
First, please visit NVIDIA-AI-IOT/Lidar_AI_Solution for the latest instructions on how to download the models directly. Then move the model.zip you download to the bevfusion/model_root directory before building the models.
To move your downloaded model to the default file location:
$ mkdir bevfusion/model_root
$ sudo cp {PATH TO YOUR model.zip DOWNLOAD} /opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion/bevfusion/model_root/model.zip
Then run the following script based on the target Docker image:
$ bevfusion/docker_run_generate_trt_engine_models.sh bevfusion/model_root
All models can be found in the host directory bevfusion/model_root.
Start Tritonserver for BEVFusion Model [x86]#
Start Tritonserver with localhost:8001 to serve the BEVFusion model. Specify the model root directory from previous steps. The script will initiate the triton_lmm Python module to serve the BEVFusion model with NVIDIA Triton-python backend. Run the following script to start the server:
$ bevfusion/docker_run_triton_server_bevfusion.sh bevfusion/model_root
[Deprecated] As an alternative to using the Tritonserver, you can start the PyTriton server to host the BEVFusion model. Note that the performance of Triton-python is better than PyTriton on average as it supports a GPU-only data buffer, but PyTriton is still compatible with the DS3D pipeline.
To start the PyTriton server, run the following script:
$ bevfusion/docker_run_pytriton_server_bevfusion.sh bevfusion/model_root
Download Test Data and Start DS3D BEVFusion Pipeline#
Download the NuScenes subset dataset into the host directory data/nuscene and mount the dataset
into the target container to start the BEVFusion pipeline. The script will automatically check and download the dataset.
The nuscene dataset for DS3D bevfusion is hosted at
GitHub Deepstream Reference Apps
bevfusion/docker_run_ds3d_sensor_fusion_bevfusion_pipeline.sh script will check and download the dataset into host directory ‘data/nuscene’ automatically.
If you want to download and un-compress the dataset manually, run the scripts:
$ export NUSCENE_DATASET_URL="https://github.com/NVIDIA-AI-IOT/deepstream_reference_apps/raw/DS_8.0/deepstream-3d-sensor-fusion/data/nuscene.tar.gz"
$ mkdir -p data && curl -o data/nuscene.tar.gz -L ${NUSCENE_DATASET_URL}
$ tar -pxvf data/nuscene.tar.gz -C data/
Note
The nuscene dataset is under a Non-Commercial Use license. Refer to the terms of use at: <https://www.nuscenes.org/terms-of-use>
There are 2 BEVFusion config files with same pipeline but with different 3D rendering options.
- ds3d_lidar_plus_multi_cam_bev_fusion.yaml renders each camera and LiDAR data into a multi-view windows, meanwhile projects LiDAR data and detected 3D bounding-box into each camera’s view to demonstrate LiDAR data alignment.
- ds3d_lidar_plus_multi_cam_bev_fusion_with_label.yaml each camera and LiDAR data into a multi-view windows, meanwhile projects detected 3D bounding-box and labels into each camera’s view.
Replace the 2 config files with each other in the following tests to see the difference.
For x86:#
The script will first check and download the dataset if they are not in data/nuscene.
$ export NUSCENE_DATASET_URL="https://github.com/NVIDIA-AI-IOT/deepstream_reference_apps/raw/DS_8.0/deepstream-3d-sensor-fusion/data/nuscene.tar.gz"
Run the script to download the dataset and start the pipeline demo:
$ bevfusion/docker_run_ds3d_sensor_fusion_bevfusion_pipeline.sh \
ds3d_lidar_plus_multi_cam_bev_fusion.yaml
Or
$ bevfusion/docker_run_ds3d_sensor_fusion_bevfusion_pipeline.sh \
ds3d_lidar_plus_multi_cam_bev_fusion_with_label.yaml
CTRL + C to terminate.
For Tritonserver on Remote machine:#
If tritonserver is running on a remote machine/container distinct from the ds3d pipeline, be sure to update the local gRPC config file at model_config_files/config_triton_bev_fusion_infer_grpc.pbtxt to use the IP address of the remote machine running tritonserver instead of localhost:
Update config file on local client machine.
grpc { url: "[tritonserver_ip_address]:8001" enable_cuda_buffer_sharing: false }
Uncomment the following line in
bevfusion/docker_run_ds3d_sensor_fusion_bevfusion_pipeline.shto use your local configs:MOUNT_OPTIONS+=" -v ./:${TARGET_WORKSPACE}"
Run the script on local machine:
$ bevfusion/docker_run_ds3d_sensor_fusion_bevfusion_pipeline.sh ds3d_lidar_plus_multi_cam_bev_fusion.yaml
Or
$ bevfusion/docker_run_ds3d_sensor_fusion_bevfusion_pipeline.sh ds3d_lidar_plus_multi_cam_bev_fusion.yaml nvcr.io/nvidia/deepstream:{xx.xx.xx}-triton-multiarch Users can replace yaml config file to ``ds3d_lidar_plus_multi_cam_bev_fusion_with_label.yaml`` for tests as well.
For Jetson Devices:#
Follow steps in Start Tritonserver for BEVFusion Model [x86] on an remote x86 machine to set up the BEVFusion Triton inference server.
Follow steps in For Tritonserver on Remote machine:, update local config file
model_config_files/config_triton_bev_fusion_infer_grpc.pbtxtand mount option as described.Then, run the script on the prebuilt deepstream-triton image:
$ bevfusion/docker_run_ds3d_sensor_fusion_bevfusion_pipeline.sh ds3d_lidar_plus_multi_cam_bev_fusion.yaml nvcr.io/nvidia/deepstream:{xx.xx.xx}-triton-multiarch
$ bevfusion/docker_run_ds3d_sensor_fusion_bevfusion_pipeline.sh ds3d_lidar_plus_multi_cam_bev_fusion_with_label.yaml nvcr.io/nvidia/deepstream:{xx.xx.xx}-triton-multiarch
CTRL + C to terminate.
Usage:#
start tritonserver BEVFusion model on x86:
$ bevfusion/docker_run_triton_server_bevfusion.sh bevfusion/model_root
The cmdline would docker-run the deepstream-triton-bevfusion container to start tritonserver and listen port 8001 for grpc inference request/response.
Start DS3D BEVFusion inference and rendering pipeline inside of the container:
# run the following commandline inside of the container.
$ deepstream-3d-lidar-sensor-fusion -c ds3d_lidar_plus_multi_cam_bev_fusion.yaml
How to update camera intrinsic/extrinsic parameters from nuscene:
following next steps to run triton_lmm/helper/nuscene_data_setup.py to print calibration data and update them into ds3d-sensor-fusion config file. See details in Dataset Generation for DS3D BEVFusion
IoT Messaging:#
Follow Kafka Quick Start to setup Kafka server and create topic quick-test for messaging tests.
$ docker run -p 9092:9092 apache/kafka:3.7.0 # start kafka server with port 9092
$ bin/kafka-topics.sh --create --topic quick-test --bootstrap-server localhost:9092 # creat topic 'quick-test'
After kafka installed, users can follow instructions below to check the results.
$ bin/kafka-console-consumer.sh --topic quick-test --bootstrap-server localhost:9092 # see fusion ds3d messaging results.
Start DS3D BEVFusion inference and kafka messaging pipeline inside of deepstream triton container:
# run the following commandline inside of the container.
$ deepstream-3d-lidar-sensor-fusion -c ds3d_lidar_plus_multi_cam_bev_fusion_iot.yaml
# edit ds3d_lidar_plus_multi_cam_bev_fusion_iot.yaml, search ds3d_fusion_msg_broker block
# update payload-type=1 for minimum 3D bbox; 2 for lidar data with protobuf
Build from source:#
To compile the sample app deepstream-3d-lidar-sensor-fusion inside of container:
$ make
$ sudo make install (sudo not required in the case of docker containers)
Build custom components from source, check DeepStream 3D Multi-Modal Lidar and Camera Sensor Fusion App
Note
To compile the sources, run make with sudo -E or root permission.
NuScenes Dataset Setup for DS3D BEVFusion Pipeline#
The sample dataset, available from GitHub Deepstream Reference Apps, is picked from the official NuScenes dataset (https://www.nuscenes.org/) and licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International Public License (“CC BY-NC-SA 4.0”).
This DS3D BEVFusion demo is using data from the NuScenes scene cc8c0bf57f984915a77078b10eb33198 (name: scene-0061), containing 39 samples.
Dataset Generation for DS3D BEVFusion#
Users can modify the script triton_lmm/helper/nuscene_data_setup.py to generate data for the DS3D sensor fusion use case from different NuScenes scenes.
Generate dataset from nuscene samples#
To reproduce the sample data and obtain the calibration matrix, follow these commands:
$ export TARGET_WORKSPACE=/opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion
$ cd ${TARGET_WORKSPACE}
$ mkdir -p dataset/nuscene data
$ docker run --rm --net=host \
-v ./dataset/nuscene:${TARGET_WORKSPACE}/dataset/nuscene \
-v ./data:${TARGET_WORKSPACE}/data \
-w ${TARGET_WORKSPACE} --sig-proxy --entrypoint python3 deepstream-triton-bevfusion:xxx \
python/triton_lmm/helper/nuscene_data_setup.py --data_dir=dataset/nuscene \
--ds3d_fusion_workspace=${TARGET_WORKSPACE} --print_calibration
Note
Replace deepstream-triton-bevfusion:xxx with the latest DeepStream version number (e.g., 7.0)
Explanation:
The first two lines set the environment variable
TARGET_WORKSPACEto the location of the deepstream-3d-lidar-sensor-fusion sample code and then change the directory to that location.The third line creates directories named
dataset/nusceneanddatainside the target workspace.The
docker runcommand executes thenuscene_data_setup.pyscript within a Docker container.Options
--rm: Removes the container after it finishes.--net=host: Allows the container to use the host network.-v: Mounts volumes to share data between the host and container.-w ${TARGET_WORKSPACE}: Sets the working directory inside the container.--sig-proxy: Enables handling of signals inside the container.--entrypoint python3: Sets the entrypoint for the container to runpython3.
The command mounts the
dataset/nusceneanddatadirectories from the host system into the container and then executesnuscene_data_setup.pywith the following arguments.--data_dir=dataset/nuscene: Specifies the directory containing the NuScenes dataset.--ds3d_fusion_workspace=${TARGET_WORKSPACE}: Sets the target workspace for the DS3D sensor fusion data.--print_calibration: Instructs the script to print the calibration data.
Note
Replace deepstream-triton-bevfusion:xxx with the latest DeepStream version number (e.g., 7.0).
The script downloads the original NuScenes data into the dataset/nuscene directory and then converts it into the format required by DS3D sensor fusion, storing the converted data in the ${TARGET_WORKSPACE}/data/nuscene directory.
Calibration Data Generation for DS3D Sensor Fusion#
The
--print_calibrationargument in the previous command outputs the following calibration data,Camera intrinsic matrix(4x4).
Camera-to-LiDAR extrinsic matrix(4x4).
LiDAR-to-Camera extrinsic matrix(4x4).
LiDAR-to-Image matrix(4x4)
How to use other nuScenes scene samples:#
You can seamlessly integrate a different nuScenes scene dataset into the deepstream-3d-sensor-fusion pipeline, ensuring accurate calibration for your specific use case.
If you wish to employ an alternative scene samples in nuScenes dataset for setting up a demonstration, follow these steps:
Update the
nuscene_data_setup.pyscript to a different scene number and generate the required sample data formats for ds3d-sensor-fusion. Run the same commandline inside the container.
$ export TARGET_WORKSPACE=/opt/nvidia/deepstream/deepstream/sources/apps/sample_apps/deepstream-3d-lidar-sensor-fusion
$ cd ${TARGET_WORKSPACE}
$ python3 python/triton_lmm/helper/nuscene_data_setup.py --data_dir=dataset/nuscene \
--ds3d_fusion_workspace=${TARGET_WORKSPACE} --print_calibration
Update the new calibration data into DS3D sensor fusion pipeline configuration files
Update intrinsic and extrinsic calibration matrix in
ds3d::datafilterlidar_alignment_filterfrom config fileds3d_lidar_plus_multi_cam_bev_fusion.yaml.each
cam_intrinsicandlidar_to_cam_extrisicrequires matrixshape: 3x4withrow_major: True, User need copy the first 3x4 matrix from the previous cmdline log output.
Update the new calibration data into triton-lmm before startup tritonserver.
Update
python/triton_lmm/server/pytriton_server.pyfor all required matrix.
Restart tritonserver see instructions in Start Tritonserver for BEVFusion Model [x86]
Restart ds3d sensorfusion pipeline see instructions in Download Test Data and Start DS3D BEVFusion Pipeline
Citation#
BEVFusion model is originally from github bevfusion.
@inproceedings{liu2022bevfusion,
title={BEVFusion: Multi-Task Multi-Sensor Fusion with Unified Bird's-Eye View Representation},
author={Liu, Zhijian and Tang, Haotian and Amini, Alexander and Yang, Xingyu and Mao, Huizi and Rus, Daniela and Han, Song},
booktitle={IEEE International Conference on Robotics and Automation (ICRA)},
year={2023}
}
nuscene dataset is from nuscene.org.
@article{nuscenes2019,
title={nuScenes: A multimodal dataset for autonomous driving},
author={Holger Caesar and Varun Bankiti and Alex H. Lang and Sourabh Vora and
Venice Erin Liong and Qiang Xu and Anush Krishnan and Yu Pan and
Giancarlo Baldan and Oscar Beijbom},
journal={arXiv preprint arXiv:1903.11027},
year={2019}
}
@article{fong2021panoptic,
title={Panoptic nuScenes: A Large-Scale Benchmark for LiDAR Panoptic Segmentation and Tracking},
author={Fong, Whye Kit and Mohan, Rohit and Hurtado, Juana Valeria and Zhou, Lubing and Caesar, Holger and
Beijbom, Oscar and Valada, Abhinav},
journal={arXiv preprint arXiv:2109.03805},
year={2021}
}